DSair2 ロボット運転士
DSair2のWebアプリには、ロボット運転士機能が搭載されています。 運転を覚えさせる(ティーチング)ことで、簡易的な自動運転をお楽しみいただけます。



ロボット運転士は、それほど俊敏には動けません。たまに遅く反応することもあります。 温かい目で、ロボット運転士を指導いただければ幸いです。
制限事項
- 在線検出機能である、S88やRailComと連携する機能はありません。あくまでも時間ごとの運転操作を記録するのみです。
- ロボット運転中に、スマホやPCのスリープ機能が働くと予期せぬ動きをする場合があります。スリープ機能への対応はしておりませんので、スリープ設定を解除するか、定期的に操作するなどしてスリープ機能を動かさないようにしてください。
- 列車の種類や重量、デコーダの設定により、速度は大きく変わります。正確な位置に車両を止めることはできません。
- 0.25秒おきに操作を記録するので、±0.25secの操作のばらつきがあります。
- JavaScriptの実行状況によってはさらに操作のバラツキの時間が前後する場合があります
- 記録対象は、速度・ファンクション・進行方向のみです
- ロボット運転は無限に繰り返します。止める場合は、STOPボタンを押すか、メータを触って運転に介入してください。なおファンクション操作では解除されません。
- ロボット運転中に操作している車両のアドレスを変更すると、操作する対象のアドレスも変更されます。
- ティーチングしたデータはブラウザの内部メモリエリアに保存され、再起動しても保持されます。
- ティーチングを開始すると、以前のデータは自動削除されます。
- 覚えられるデータは1つのみです。増やすつもりはありません。テキストファイルでエクスポート・インポートできるようにしてあるので、複数のパターンを使い分ける場合は、テキストファイルを管理してください。
- 編集機能はありません。編集したい場合は、PCなどのテキストエディタを使用してください。
使用方法
WebAppのR3以降をご利用ください。ZIPファイルに入っている、SD_WLANフォルダの中身をすべて、DSair2に差し込むFlashAir W-04のSD_WLANフォルダ(隠しフォルダです)に上書きコピーしてください。アップデートツールでも行えます。
そのあとは、通常通り、DSair2にスマホやPCからWiFi経由でアクセスしてください。

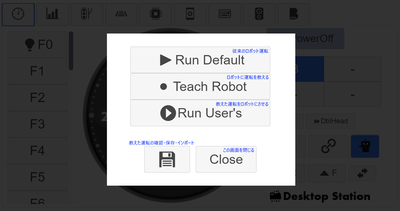
ロボットボタンを押すと、今まではそのままロボット運転でしたが、今回から画面が変わり、機能が選べるようになりました。
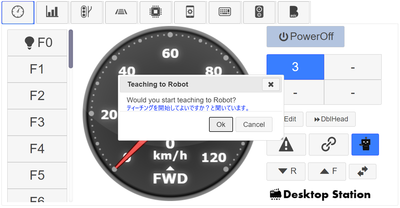
ティーチングを開始させると、確認画面が出ます。ティーチングを開始すると、以前の教えたデータは削除されます。もし大事な運転パターンでしたら、保存機能で保存しておくことをお勧めします。
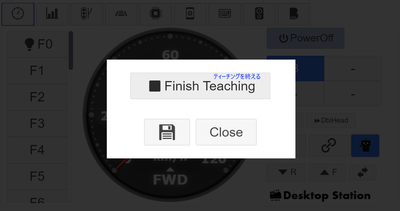
ティーチング中は、目を見開いたロボットがあなたを見て、運転を覚えます。速度変更とファンクション、進行方向のみを覚えます。車両アドレスやポイント切り替えは無視されます。

ティーチングを終えたら、ロボットボタンを押して、ティーチングを終了させましょう。これでティーチングは完了し、あなたが運転したパターンはスマホに自動保存されます。このパターンは、テキストファイルでダウンロードできます。
動かしたい場合は、Run User's(ユーザーのものを実行する)を押しましょう。ティーチングした結果をそのままなぞって実行してくれます。なお、最後まで行くと、また最初に戻って動き出すので、適度に待ち時間などを考えてティーチングすると良いでしょう。
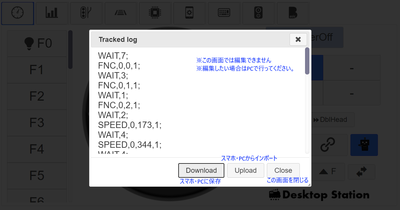
保存画面は以下です。フロッピーディスクのマークをタップすると出てきます。テキストファイルはインポートもできますので、好みの運転パターンは後で再現させることもできます。
対応コマンド
保存機能で出力できるTXT形式のファイルは、単純なスクリプトで運転パターンが書かれています。意味は以下の通りです。 これらのコマンドは、0.25秒(250ms)に1行ずつ、実行されます。WAITがある場合は、指定回数分、待ちます。
| 機能 | コマンド | 引数 | 備考・解説 |
|---|---|---|---|
| ウェイト | WAIT | 待ち時間 | 0.25秒/d刻みの時間を指定します。 |
| 速度変更 | SPEED | 0,速度 | 速度は0~1023の値を指定します。1023が最高速度です。 |
| 進行方向 | DIRECTION | 0,進行方向 | 進行方向は1がREV、0がFWDです。 |
| ファンクション操作 | FNC | 0,番号,操作 | 番号は0-28(F0-F28)まで。操作は0(OFF)または1(ON)です。 |
| ポイント操作 | ACC | ポイントアドレス,操作 | ポイントアドレス1)は0-2043まで。操作は0(分岐)または1(直進)です。 |
| 京王ATC風現示 | ATC | 速度 | 速度は0~1023の値を指定します。1023が最高速度です。 |
| 京王ATC風停止 | ATCSTOP | 速度,停止までの制限時間 | 速度は0~1023の値を指定します。1023が最高速度です。 |
時間はすべて、0.25秒が1となります。4を指定すると1秒に相当します。40を指定すると10秒です。
生成したスクリプト例
WAIT,7; FNC,0,0,1; WAIT,3; FNC,0,1,1; WAIT,1; FNC,0,2,1; WAIT,2; ATC,256; SPEED,0,173,1; WAIT,4; SPEED,0,344,1; WAIT,4; SPEED,0,685,1; WAIT,3; SPEED,0,507,1; WAIT,4; SPEED,0,343,1; WAIT,3; SPEED,0,187,1; WAIT,3; SPEED,0,0,1; WAIT,4; DIRECTION,0,2; WAIT,2; SPEED,0,245,1; WAIT,2; SPEED,0,540,1; WAIT,2; SPEED,0,358,1; WAIT,2; SPEED,0,207,1; WAIT,2; SPEED,0,0,1; WAIT,6; DIRECTION,0,1; WAIT,3; FNC,0,2,0; WAIT,2; FNC,0,1,0; WAIT,1; FNC,0,0,0;
サポートについて
問い合わせは、デジタル鉄道模型フォーラムにスレッドを立てて記載ください。 メールやツイッターでのサポートは受けておりません。
よくある質問
複数列車を動かせますか
CAB画面で選択している車両を動かす仕組みです。スクリプトには車両アドレスを保持しないようにしているので、複数列車は動かせません。複数列車を動かしたい場合は、Education Platformをお使いください。ティーチングしたスクリプトをXMLで出力したものが、ご利用いただけます。
シンプルに、「今選んでいる車両を、ロボット運転士があなたの代わりに動かす」というコンセプトにしています。 より複雑な動きを楽しみたい場合には、EducationPlatformが最適です。
車両の位置がずれていきます
ティーチング機能は、在線検出器やセンサを使わずに、時間計測のみで車両を動かす簡易的な自動運転機能です。 様々な誤差が常に車両の操作に対して生じてくるため、厳密な位置調整機能は実現できません。
厳密に位置を合わせたい場合には、本物の電車のATO等と同じように、線路上にセンサを置く必要があります。
レビュー記事・参考文献など
- DSair2ティーチング機能を試す これまでのあらすじ