アナログDC用の準備
組み立ての準備
Desktop StationをアナログDCで動かすためには以下の部品が必要です。.
- Arduino board(duemilanove328 or UNO R3 or compatible one, for example Arduino UNO R3, Akiduki's AT-MEGA board)
- Motor Shield (DF-Robot, Genuie.
- USB cable (suitable with your arduino board)
- Windows xp, Vista, 7 or 8 PC. Please install .NET Framework 2.0 runtime package if not installed.
- Arduino用の9-12VのACアダプタ
- 線路に接続する電源供給用ケーブル。線路のメーカーに応じて準備ください。
Desktop Stationを動かすためには以下のソフトウェアが必要です。必要なソフトウェアは全て無償で手に入ります。
- Arduino IDE (シリアルドライバを含む)
- Desktop Station と Analog_RSx.ino
- もしインストールされていない場合、 .NET Framework 2.0 ランタイムパッケージ
ハードウェアの準備
とても簡単です。モーターシールドとArduinoを接続します。モーターシールドはPWMモードで動くようにジャンパピン等で設定しておけば動かせます。
モーターシールドの準備
お使いのモーターシールドに応じて "AnalogRSx.ino"のピンアサインを変更する必要があります。デフォルトでは、DF-ROBOTのモーターシールド用となっています。
Table: モーターシールド用のデジタル端子割り付け
| DF-Robot | Arduino Genuie | Note | |
| Motor1 PWM | D5 | D3 | Edit MOTOR1_PWM. |
| Motor1 Direction | D4 | D12 | Edit MOTOR1_DIR. |
| Motor1 Break | not assigned | D9 | Edit MOTOR1_BRK. |
| Motor2 PWM | D6 | D11 | Edit MOTOR2_PWM. |
| Motor2 Direction | D7 | D13 | Edit MOTOR2_DIR. |
| Motor2 Break | not assigned | D8 | Edit MOTOR2_BRK |
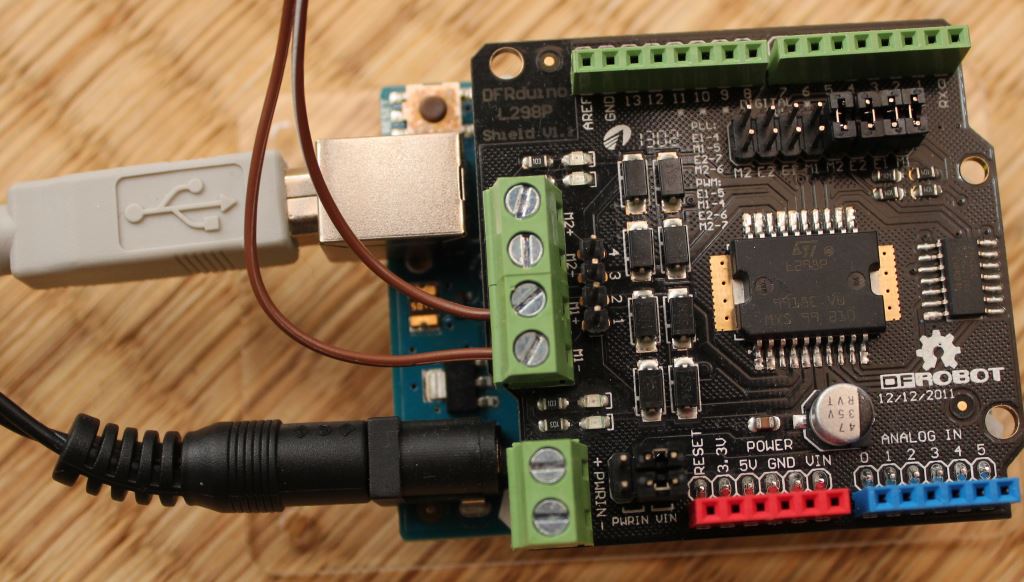
秋月電子で購入できるDF-ROBOTのモーターシールドのジャンパピン設定は以下の通りです。
ソフトウェアの準備
- RailuinoとDesktop Stationをダウンロードします。
- Arduino IDE 1.0.xをダウンロードし、解凍します。
- ArduinoボードをPCに接続します。
- Arduinoボードをはじめて接続した場合、シリアルドライバをインストールします。シリアルドライバはArduino IDEに含まれています。詳しくはUNOによるインストール解説ページもしくはarduino.ccをご覧ください。
Note: Seeeduino Liteをご利用の方は、Seeeduino Liteでの書き込み手順を参照ください。 - Desktop StationをPCにインストールします。ダウンロードしたDesktop StationのZIPファイルを解凍するだけです。
- アナログDCゲートウェイのスケッチ"Analog_RSx.ino"をコンパイルし、Arduinoに書き込んでください。"Analog_RSx.ino"はダウンロードページからダウンロードできます。書き込みについてはアップロード方法をご覧ください。
- コンパイルしたAnalog_RSx.inoをArduinoにアップロード(書き込み)します。
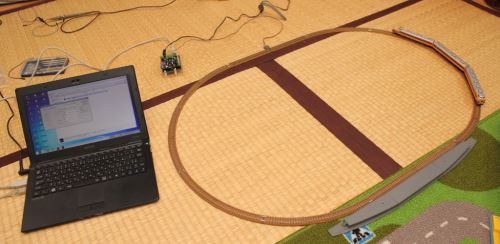
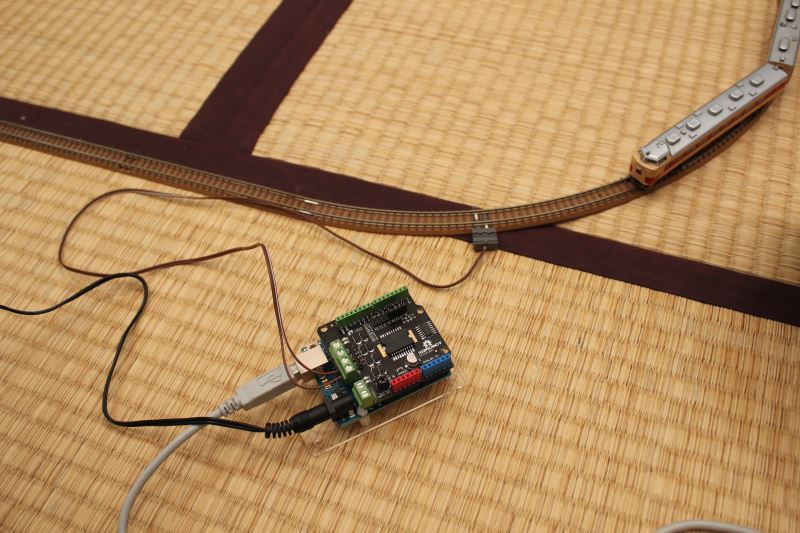
- モーターシールドとPC、レールをそれぞれ適切なケーブルを使って接続してください。以下の写真はTOMIX製レール・ケーブルを用いた例です。
- 設定方法としては、MM2のアドレスは1または2です。モーターシールドのアウトプット1または2に割り当てられています。